
Downlink Frequency: 145.890 MHz CW Beacon: 145.910 MHz Callsign: BJ1SL Transmit Power: 20dBm Launched: 15 Jun 2017 from Jiuquan Satellite Launch Center, on the CZ-4B launch vehicle. Altitude: 524km Sun Synchronous Orbit Format: 4800bps GMSK AX25
CAS-4B is another micro satellite about 49cm by 50cm by 63cm. It is very similar to CAS-4A. It also has three axis stabalization and the primary payload was a Camera with 1.98m resolution.
I had initially tried to decode CAS-4A and failed. I had a good pass of CAS-4B coming up so I did a little research to make sure I was decoding things correctly. First of all GMSK is just Frequency Shift Keying. As I said in my notes for CAS-4A, the acronym stands for Gaussian Minimum Shift Keying. The minimum shift part means that the data and carrier are synchronized so that the data changes happen when the carrier is zero. This removes phase discontinuities. The data is run through a Gaussian filter to reduce the sideband power. This makes it a very power efficient mode and it is part of the GSM Mobile Phone standard. It is a good choice for something battery powered, like a phone or a small spacecraft. With that said it is harder to decode than straight FSK with a Root Raised Cosine Filter.
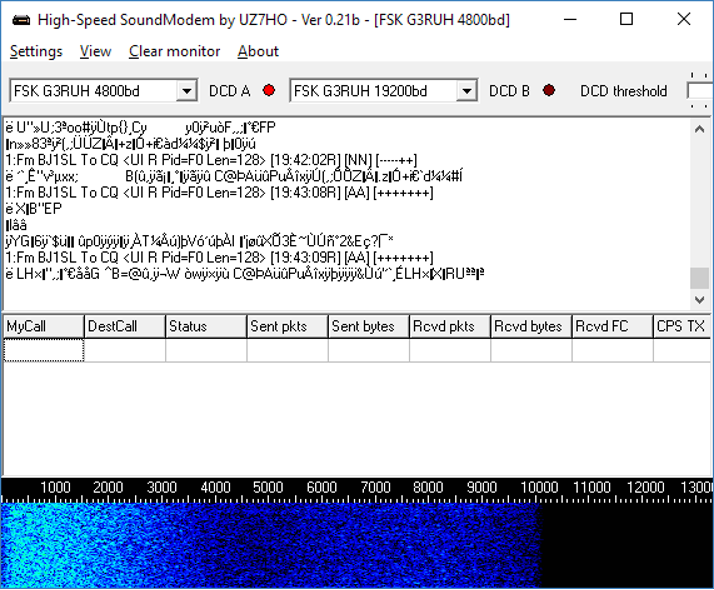
But it is just FSK. So we don't use a special GMSK decoder, we can just use the hs_soundmodem "FSK G3RUH 4800bd" decoder. Once the encoded bits are recovered it is classic AX25 frame encoding.
With a good pass of CAS-4B it decoded easily. I needed to make sure that the sound level out of HDSDR through the Virtual Audio Cable and into hs_soundmodem was strong enough to show the data on the waterfall.
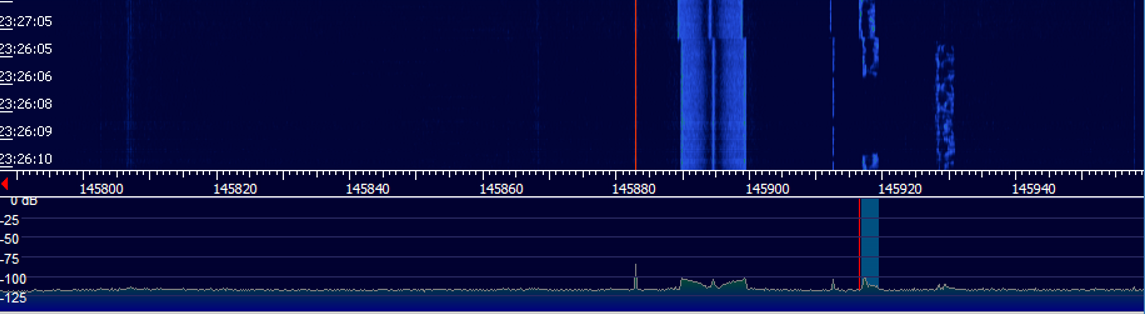
Perhaps just as interesting, there were two VE3 stations calling CQ through the transponder. You can see there signals below and I have highlighted on of them with a USB demodulator.
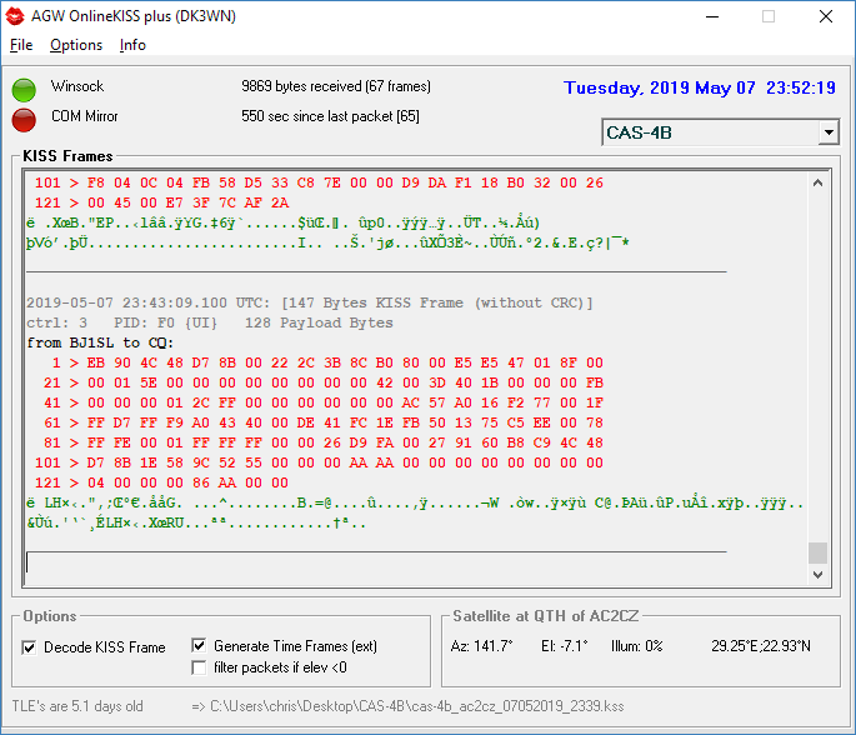
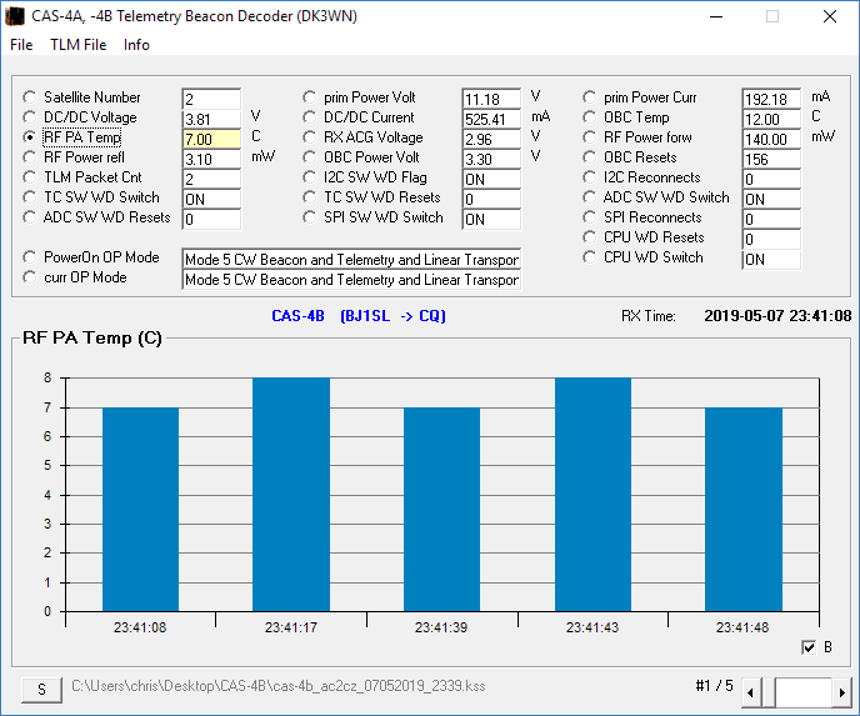
From HDSDR process is quite convoluted, feed the audio via Virtual Cable into hs_soundmodem, feed that via a TCP port into AGW Online Kiss and then capture the bytes in a file. Then open the file in the Cas4 decocder to see the results. Phew. That is a lot of steps and quite easy to get wrong. My first thought is to create a single program that takes the output of hs_soundmodem and displays the telemetry, just as Pacsat Ground does. But they may need to wait for another day. For now this is spacecraft #4 on my quest.
Enter Comments Here:
Copyright 2001-2021 Chris Thompson
Send me an email